3D Radon-Cumulative Distribution Transform (3D R-CDT)
This tutorial will demonstrate: how to use the forward and inverse operations of the 3D R-CDT in the PyTransKit package.
Class:: RadonCDT3D
Parameters:
Npoints : scaler, number of radon projections (default = 1024)
use_gpu : boolean, use GPU if True (default = False)
Functions:
Forward transform: sig1_hat = forward(x0_range, sig0, x1_range, sig1)
Inputs: ---------------- x0_range : 1x2 array contains lower and upper limits for independent variable of reference signal (sig0). Example: [0,1]. sig0 : 3d array, shape (L, L, L) Reference signal. x1_range : 1x2 array contains lower and upper limits for independent variable of input signal (sig1). Example: [0,1]. sig1 : 3d array, shape (L, L, L) Signal to transform. Outputs: ---------------- sig1_hat : 2d array, shape(L, Npoints) R-CDT of 3D input signal sig1.Inverse transform: sig1_recon = inverse(sig1_hat, sig0, x1_range)
Inputs: ---------------- sig1_hat : 2d array, shape(L, Npoints) R-CDT of 3D signal sig1. sig0 : 3d array, shape (L, L, L) Reference signal. x1_range : 1x2 array contains lower and upper limits for independent variable of input signal (sig1). Example: [0,1]. Outputs: ---------------- sig1_recon : 3d array, shape (L, L, L) Reconstructed signal.
Example
The example will cover the following operations: * Forward and inverse operations of the 3D R-CDT
[1]:
import sys
sys.path.append('../')
from pytranskit.optrans.continuous.radoncdt3D import RadonCDT3D
import time
import numpy as np
from scipy.io import loadmat
import matplotlib.pyplot as plt
%matplotlib inline
Forward 3D Radon-CDT
Load 3D phantom data from ‘images/’ direcotry
[2]:
datafile = 'images/phantom3D.mat'
img3D = loadmat(datafile)['phantom3D']
i03D = np.ones(img3D.shape)
Run forward 3D R-CDT on the 3D phantom data
[3]:
use_gpu = False # Set it True if want GPU support
x0_range = [0,1]
x_range = [0,1]
Npoints = 1000
# Create an instance of 3D R-CDT
rcdt3D = RadonCDT3D(Npoints, use_gpu)
tic=time.time()
# Forward function
img3Dhat=rcdt3D.forward(x0_range, i03D/np.sum(img3D), x_range, img3D/np.sum(img3D), rm_edge=False)
toc=time.time()
Run_time = toc - tic
print("Forward 3D RCDT is done in {} seconds".format(Run_time))
Forward 3D RCDT is done in 19.50796389579773 seconds
Inverse 3D Radon-CDT
[4]:
tic=time.time()
# Inverse function
img3D_recon = rcdt3D.inverse(img3Dhat, i03D, x_range)
toc=time.time()
Run_time = toc - tic
print("Inverse 3D RCDT is done in {} seconds".format(Run_time))
Inverse 3D RCDT is done in 20.88492465019226 seconds
Show results
Show specific slices from the input 3D phantom image and reconstructed image
[5]:
sliceSel = int(0.5*img3D.shape[0])
# plot original 3D image
plt.figure(figsize=(15,5))
plt.suptitle('3D Phantom')
plt.subplot(131)
plt.imshow(img3D[sliceSel,:,:])
plt.title('Axial view')
plt.subplot(132)
plt.imshow(img3D[:,sliceSel,:])
plt.title('Coronal view')
plt.subplot(133)
plt.imshow(img3D[:,:,sliceSel])
plt.title('Sagittal view')
plt.show()
# plot 3D Radon transform
fig=plt.figure(figsize=(15,5))
plt.imshow(img3Dhat)
plt.title('3D R-CDT')
plt.show()
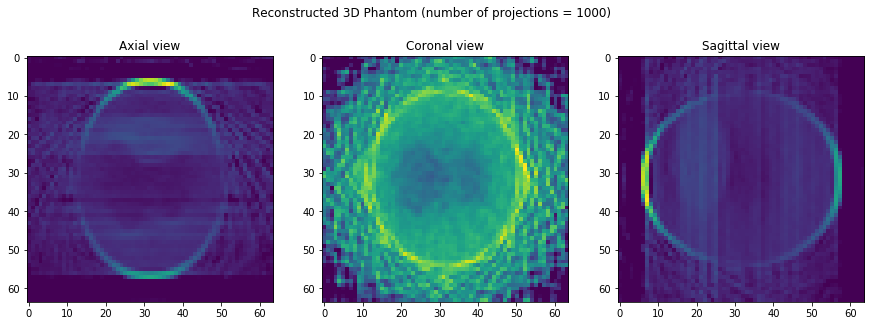
# plot 3D reconstruction
plt.figure(figsize=(15,5))
plt.suptitle('Reconstructed 3D Phantom (number of projections = {})'.format(Npoints))
plt.subplot(131)
plt.imshow(np.log10(.1+img3D_recon[sliceSel,:,:]))
plt.title('Axial view')
plt.subplot(132)
plt.imshow(np.log10(.1+img3D_recon[:,sliceSel,:]))
plt.title('Coronal view')
plt.subplot(133)
plt.imshow(np.log10(.1+img3D_recon[:,:,sliceSel]))
plt.title('Sagittal view')
plt.show()


[ ]: